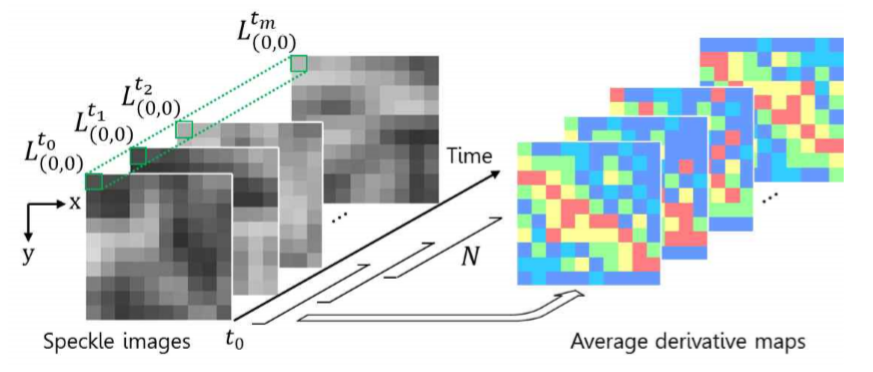
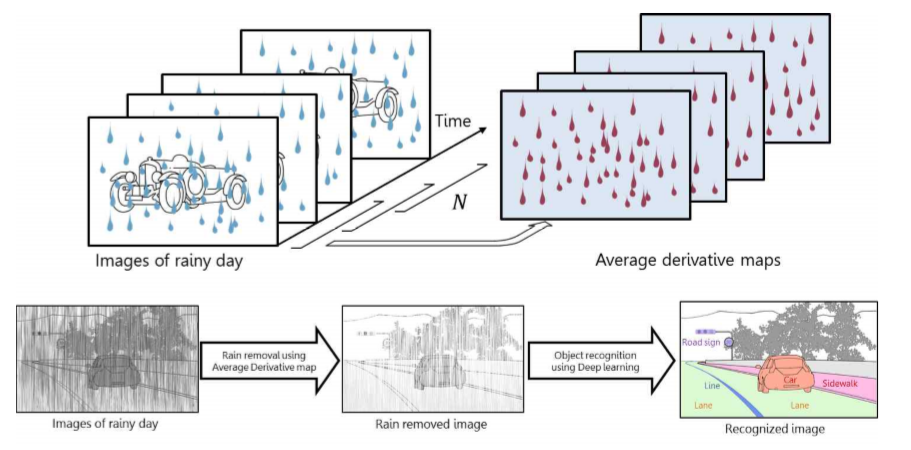
Rain noise reduction using Average derivative Technique
Rain noise can be defined as the temporally random rain flow. Thus, it can be removed by estimating the direction and intensity of the rain temporally. In this project, we propose average derivative (AD) in laser speckle flowgraphy (LSFG) to remove the rain noise. in general, AD technique can measure blood flows in deep tissue with removing speckle noise. Thus, we use this technique to remove the rain noise because of this feature. Below figures show the basic concept of AD technique.
Make new autonomous vehicle system with deep learning system
Researching new autonomous vehicle system with deep learning
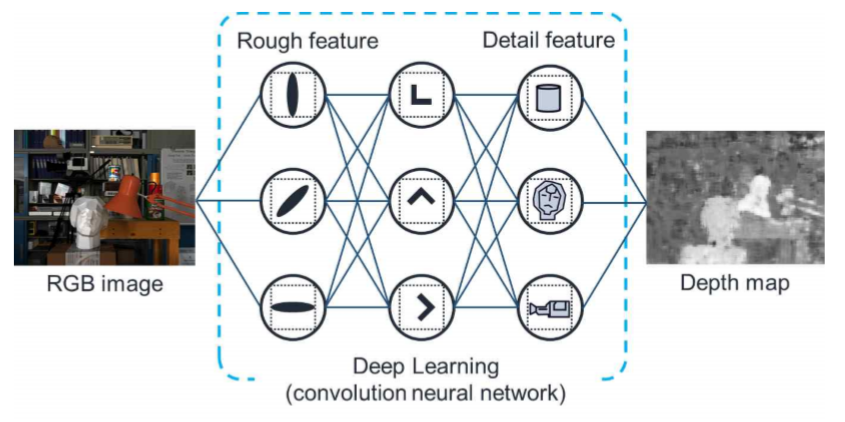
Deep learning technique can process and optimize unknown data by learning from a lot of training data (ie, big data). For depth estimation, in general, at least two different images (ie, stereo images) are required. However, in practical applications , this requirement is not efficient. Therefore, in our research, we propose a deep learning based depth estimation from single image. To estimate depth map from single image, we will use convolutional neural network (CNN) as shown below figures. In addition, using more accurate information from our noise removal techniques (eg, rain, fog, and night) as training data for deep learning system, we will do our best to recognize the objects and obstacles. Finally, Our laboratory's goal is to generate meaningful information from our deep learning system and displaying various data in autonomous vehicle display systems as shown as below figures.
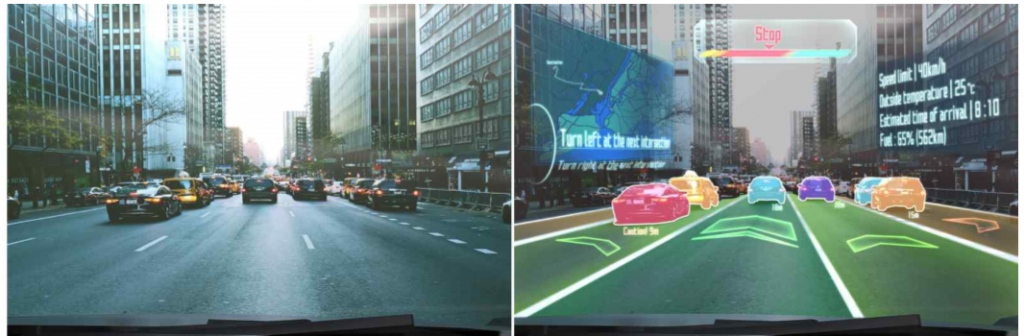
Expected Image of Research Results of autonomous vehicle system
*


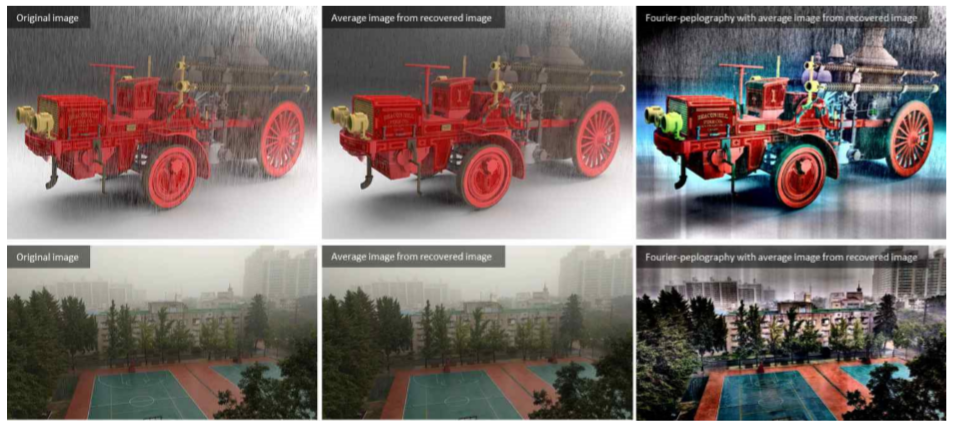
Our proposed technique can provide the accurate visualization under inclement weather conditions since it does not use various image processing techniques, but use optical signal processing techniques. Also, it does not require any prior information for inclement weather conditions and its processing speed is real time. Our night vision technique also can visualize the objects and obstacles under severely photon-starved conditions. Rain can be removed by estimating the flow of rain. Finally, we can obtain and display 3D information by deep learning based depth estimation, light field imaging, and 3D display system.